
-

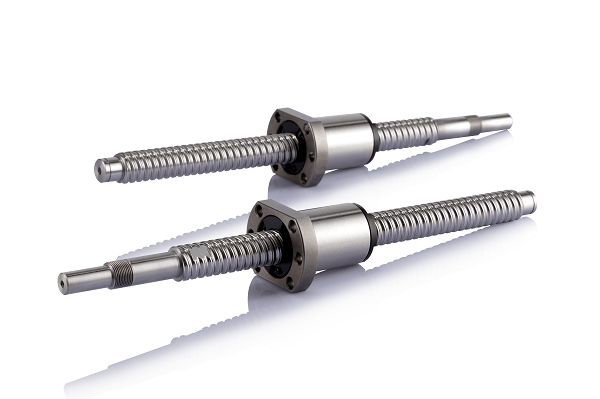
Pilkŝraŭba Paŝmotoro en Apliko de Biokemia Analizilo
La pilkŝraŭba paŝomotoro konvertas rotacian moviĝon al lineara moviĝo ene de la motoro, permesante ke la kantilevra mekanismo estu rekte konektita al la motoro, igante la mekanismon kiel eble plej kompakta. Samtempe, ne estas necese...Legu pli -

KIO ESTAS LA RADILMOTORO?
Sistemo de aktivigo de transmisio Dentomotoro estas mekanika aparato konsistanta el elektromotoro kaj rapidreduktilo. ...Legu pli -

MERKATO DE PRECIZAJ PILKŜRAŬBOJ: TUTMONDAJ INDUSTRIAJ TENDENCOJ 2024
Pilkŝraŭboj, kiel grava mekanika transmisia elemento, la malsuprenflua aplika merkato ĉefe inkluzivas industrian robotikon kaj duktoscenarojn, ktp. La fina merkato estas ĉefe orientita al la kampoj de aviado, fabrikado, energio kaj servaĵoj. La tutmonda b...Legu pli -

Humanoidaj Robotoj Spronas Kreskon en la Merkato de Ŝraŭboj
Nuntempe, la industrio de humanoidaj robotoj ricevis multan atenton. Pelita de novaj postuloj ĉefe por inteligentaj aŭtoj kaj humanoidaj robotoj, la industrio de globŝraŭboj kreskis de 17,3 miliardoj da juanoj (2023) ĝis 74,7 miliardoj da juanoj (2030). ...Legu pli -

Apliko de Pilkŝraŭboj en Preciza Medicina Ekipaĵo.
En la moderna medicina kampo, la uzo de precizaj medicinaj aparatoj fariĝis nemalhavebla parto de provizado de pli precizaj kaj efikaj medicinaj traktadoj. Inter ili, globŝraŭboj, kiel tre preciza movkontrola teknologio, estas vaste uzataj...Legu pli -
Muelado kaj Rulado - Avantaĝoj kaj Malavantaĝoj de Pilkaj Ŝraŭboj
Pilkŝraŭbo estas alt-efika metodo por konverti rotacian moviĝon al lineara moviĝo. Ĝi kapablas fari tion per uzado de recirkulanta pilkmekanismo inter la ŝraŭba ŝafto kaj la nukso. Ekzistas multaj malsamaj tipoj de pilkŝraŭboj, ...Legu pli -

Kiel Paŝmotoroj Havas Progresintajn Medicinajn Aparatojn
Ne estas novaĵo, ke movkontrola teknologio progresis preter tradiciaj fabrikadaj aplikoj. Medicinaj aparatoj aparte enkorpigas movadon laŭ vasta gamo da manieroj. Aplikoj varias de medicinaj elektraj iloj ĝis orto...Legu pli -
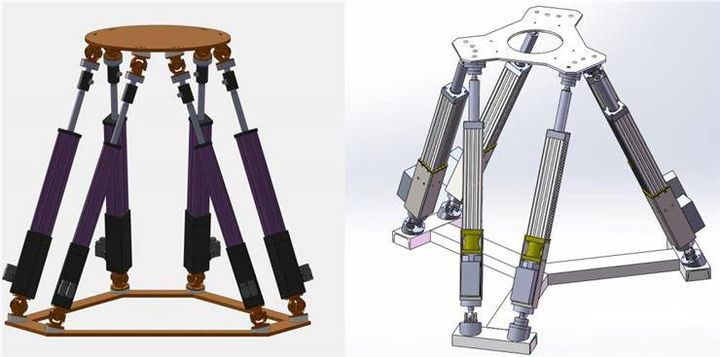
Kio Estas 6-DOF Libereca Roboto?
La strukturo de la ses-grada-de-libereca paralela roboto konsistas el la supra kaj malsupra platformoj, 6 teleskopaj cilindroj en la mezo, kaj 6 globaj ĉarniroj ĉe ĉiu flanko de la supra kaj malsupra platformoj. La ĝeneralaj teleskopaj cilindroj konsistas el servo-elektraj aŭ ...Legu pli
Bonvenon al la oficiala retejo de Ŝanhaja KGG Robots Co., Ltd.

Industriaj Novaĵoj
-

Supro




