

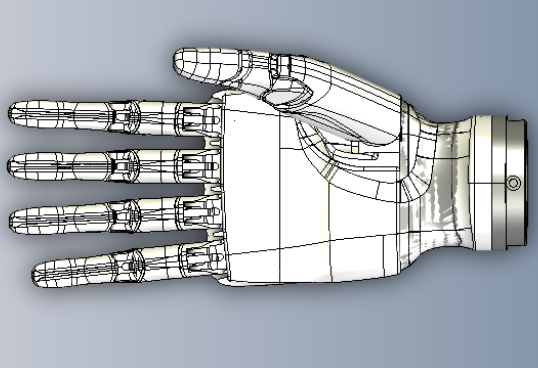
Kun la rapida disvolviĝo de inteligenta fabrikado kaj robotiko, la lerta mano de humanoidaj robotoj fariĝas pli kaj pli grava kiel ilo por interagado kun la ekstera mondo. La lerta mano estas inspirita de la kompleksa strukturo kaj funkcio de la homa mano, kiu ebligas al robotoj plenumi diversajn taskojn kiel prenado, manipulado kaj eĉ sentado. Kun la kontinua progreso de industria aŭtomatigo kaj artefaritinteligenteca teknologio, lertaj manoj iom post iom transformiĝas de ununura ripetema taskoplenumanto al inteligenta korpo kapabla plenumi kompleksajn kaj variajn taskojn. En ĉi tiu transforma procezo, la konkurencivo de hejmaj lertaj manoj iom post iom aperis, precipe en la movaparato, transmisiaparato, sensoraparato, ktp., la lokaliza procezo estas rapida, la kostavantaĝo estas evidenta.
Planedarollersŝipanarojestas la centra parto de la "membroj" de humanoida roboto kaj povas esti uzataj en diversaj aplikoj, inkluzive de brakoj, kruroj kaj lertaj manoj, por provizi precizan linian movkontrolon. La Optimus-torso de Tesla uzas 14 rotaciajn artikojn, 14 liniajn artikojn kaj 12 kavajn tasartikojn en la mano. La liniaj artikoj uzas 14 inversigitajn planedajn rulŝraŭbojn (2 en la kubuto, 4 en la pojno kaj 8 en la kruro), kiuj estas kategoriigitaj en tri grandecojn: 500N, 3 900N kaj 8 000N, por adaptiĝi al la ŝarĝoportantaj bezonoj de malsamaj artikoj.
La uzo de inversaj planedaj rulŝraŭboj fare de Tesla en sia humanoida roboto Optimus eble baziĝas sur iliaj avantaĝoj rilate al rendimento, precipe rilate al ŝarĝo-portkapablo kaj rigideco. Tamen, ne eblas ekskludi, ke humanoidaj robotoj kun pli malaltaj postuloj pri ŝarĝo-portkapablo uzas pli malmultekostajn globŝraŭbojn.
Pilkojskipoj en diversaj industrioj en vasta gamo de aplikoj kaj merkata postulo:
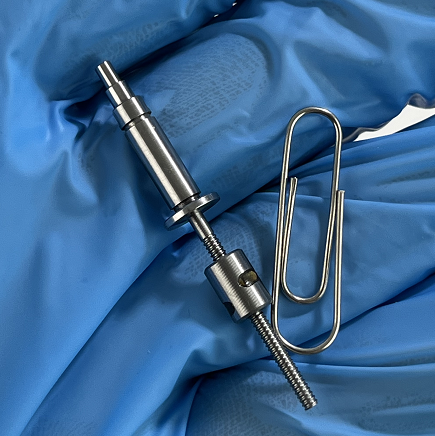
Ĉe la Pekina Robotika Ekspozicio de 2024, KGG ekspoziciis planedajn rulŝraŭbojn kun diametro de 4mm kaj globŝraŭbojn kun diametro de 1.5mm; krome, KGG ankaŭ ekspoziciis lertajn manojn kun integraj planedaj rulŝraŭbaj solvoj.


4mm diametro planedaj rulŝraŭboj


1. Aplikoj en novenergiaj aŭtomobiloj: Kun la disvolviĝo de elektrigado kaj inteligentigo de aŭtomobiloj, la apliko depilkoŝraŭbojen la aŭtomobila kampo profundiĝis, kiel ekzemple aŭtomobila drata bremsosistemo (EMB), postrada stirsistemo (iRWS), stirado-per-drata sistemo (SBW), pendosistemo, ktp., same kiel reguligaj kaj kontrolaj aparatoj por aŭtomobilaj komponantoj.
2. La apliko de maŝinila industrio: globŝraŭbo estas unu el la normaj kernaj komponantoj de maŝiniloj, maŝiniloj enhavas rotaciajn aksojn kaj linearajn aksojn, linearaj aksoj konsistas el ŝraŭboj kajgvidrelojpor atingi precizan poziciigon kaj movadon de la laborpeco. Tradiciaj maŝiniloj ĉefe uzas trapezajn ŝraŭbojn / glitŝraŭbojn, CNC-maŝiniloj baziĝas sur tradiciaj maŝiniloj, aldonante ciferecajn kontrolsistemojn, la precizecpostuloj por la transmisio de la laborpeco estas pli altaj, kaj pli da globŝraŭboj nuntempe estas uzataj. La tutmonda provizoĉeno de maŝiniloj en la spindelo, pendolokapo, rotacia tablo kaj aliaj funkciaj komponantoj de plej multaj maŝiniloj por konsideroj pri personigo aŭ diferencigo emas esti memproduktitaj kaj memproduktitaj, sed la ruliĝantaj funkciaj komponantoj estas baze ĉiuj subkontraktitaj, kune kun la maŝinila industrio ĝisdatiganta la ruliĝantajn funkciajn komponantojn de la postulo je daŭra kresko en la certeco de forta.


1.5mm diametro globŝraŭboj
3. Aplikoj de humanoidaj robotoj: humanoidaj robotaj aktuatoroj estas dividitaj en hidraŭlikajn kaj motorizitajn mekanismojn laŭ du programoj. Kvankam hidraŭlikaj mekanismoj havas pli bonan rendimenton, la kosto kaj bontenado estas pli altaj, kaj nuntempe ili estas malpli uzataj. La motora solvo estas la nuna ĉefa elekto, la planeda rulŝraŭbo havas fortan ŝarĝoportantan kapaciton kaj estas la kerna komponanto de la...lineara aktuatorode la humanoida roboto, kiu estas uzata por realigi la precizan regadon de la robotaj artikoj. Eksterlande Tesla, la germana roboto LOLA ĉe la Universitato de Munkeno, la enlanda Politeknikejo Huahui, Kepler uzis ĉi tiun teknologian vojon.
Por planedaj rulŝraŭboj, la nuna enlanda merkato de planedaj rulŝraŭboj estas ĉefe okupata de eksterlandaj fabrikantoj, la ĉefaj eksterlandaj fabrikantoj de Svislando Rollvis, Svislando GSA kaj Svedio Ewellix konsistigis merkatparton de 26%, 26%, 14%.
Ekzistas ia breĉo inter hejmaj entreprenoj kaj eksterlandaj entreprenoj rilate al la kerna teknologio de planedaj rulŝraŭboj, sed laŭgrade pliboniĝas la precizeco, maksimuma dinamika ŝarĝo, maksimuma statika ŝarĝo kaj aliaj aspektoj de rendimento, kaj la hejmaj fabrikantoj de planedaj rulŝraŭboj kombinita merkatparto de 19%.
Afiŝtempo: 28-a de februaro 2025




